かなり間が空いたが、再び、デジタルストレージの作業を行った。
ソフトの作業も平行して行っており、かなり充実してきている。
プローブを買い直す。

60MHz のプローブを買い直した、まぁ現代は、それなりに安く購入できるので助かる。
以前に買った 60MHz のプローブはトリマを回すのに特殊なドライバーが必要で(ドライバー無くした)、もっと安いプローブがあったので、別件で部品を買うついでに買ってみた。
昔会社勤めの時、プローブの扱いに注意するよう散々言われた、テクトロニクスの 350MHz オシロ用プローブは1本5万くらいしていた。
※実験で色々作業している過程で、プローブを壊す(先のピンを折ってしまう)事が多かったようだ。
※テクトロのプローブは、沢山の知恵が詰っている優れもので、感動した事を覚えている。
プリアンプを考える
実験的に、初段のプリアンプとして、OPA2134Aを使っていたが、これは、オーディオ用なので、帯域が足りない。
※高い周波数でゲインが低下する。
※それに、そんなに安いオペアンプではない。
そこで、色々なオペアンプを探すものの、高性能な物は値段が高く、オーバースペックでもある。
サンプリングが 2MHz だと、高い周波数は測れないのは当然なのだが、
低い周波数でも矩形波を観測した場合などに、立ち上がりや立下りが実際と異なり鈍ると測定器として成立しない。
※正弦波でも、周波数によってゲインが下がって、正確な電圧を計測出来ない。
入力インピーダンスは通常1Mオームと高いので、高速でも、バイアス電流がある程度必要なオペアンプは使えない。
意外と丁度良い物が無い・・
基本的な特性として、以下の点が挙げられる。(これは、今回のプロジェクトに合致する)
※他にも、色々な項目があり、以下の条件をクリアしていても使えない場合もある。
- スルーレートが高く、GB積が大きい
- 入力バイアス電流が低い
- 雑音が少ない
- +-5V で使える
- コストがそれなり
- 二個入り
探す目安でしかないが、非常に沢山の品種から探すのは、何かトピックが無いと絞るのが難しいので、これらの項目で絞って選択する事になる。
※「A/D 変換の入力プリアンプ用」も選択の目安となると思う。
※1個単位で買えて、それなりに安い事も重要。
入力バイアス電流、雑音、速度は、一般的にトレードオフの関係があり、昔は、そのようなオペアンプは無かったと思うが、現在は、技術革新があり、そのような品種がリリースされている。
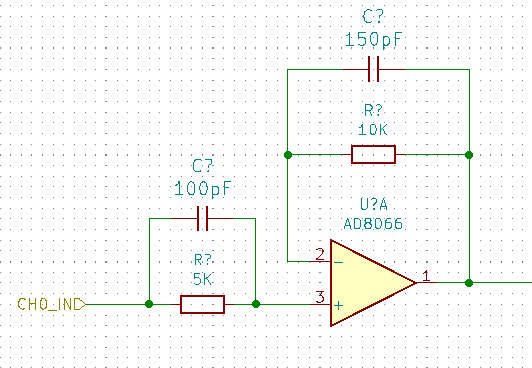
それで見つけたのが「アナログデバイセズの AD8066」、チップワンストップで10個程購入した(1個400円くらいだった)
※現在は、廃盤になったのか、在庫分くらいしか無いようで、倍の値段になっている・・・
主な特徴は:
- 入力バイアス電流:1pA
- 低価格
- 145MHzで-3dBの帯域幅(G = +1)
- 180V/µsのスルーレート(G = +2)
- 低雑音
- 5~24V
- 単一電源およびレール・ツー・レール出力
- 低いオフセット電圧:最大1.5mV
部品が来て、実験すると、まさに思った通りの性能で、感動した!
素晴らしいとしか言いようが無い!
DC カップリング
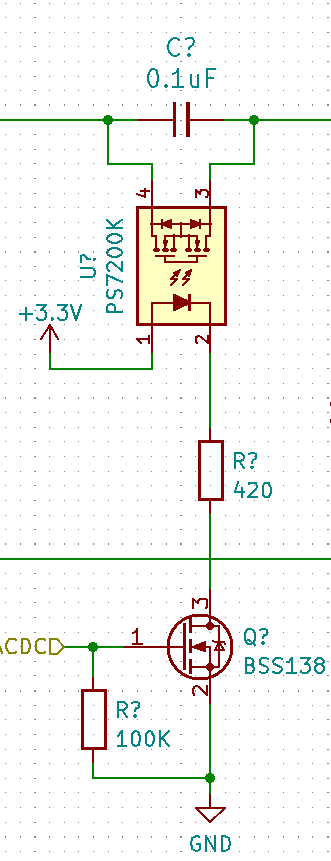
RX72N Envision Kit の外部ポートには、200オームの保護抵抗があり、直でドライブするのは不安な為、FETスイッチを入れてある。
DC を除去する「AC」モードと、DC を観測する機能の切り替えとして、回路を簡単にする為、簡易な回路に変更した。
単純に、カップリングのコンデンサを、フォトモスリレーでショートするだけにした、実験では問題無いようだ。
※ACからDCに切り替える時、コンデンサに溜まった電荷をショートするが、ON 抵抗があるので問題無いだろうと思う。
※ただ、この時使った「PS7200K」は、現在では入手が難しいようなので、他の部品を探す必要がある。
一応入力保護
入力に過大な電圧が入った場合に回路を保護するサージ対策について調べた。
完全に保護する事は出来ないが、ある程度のバリアにはなると思う。
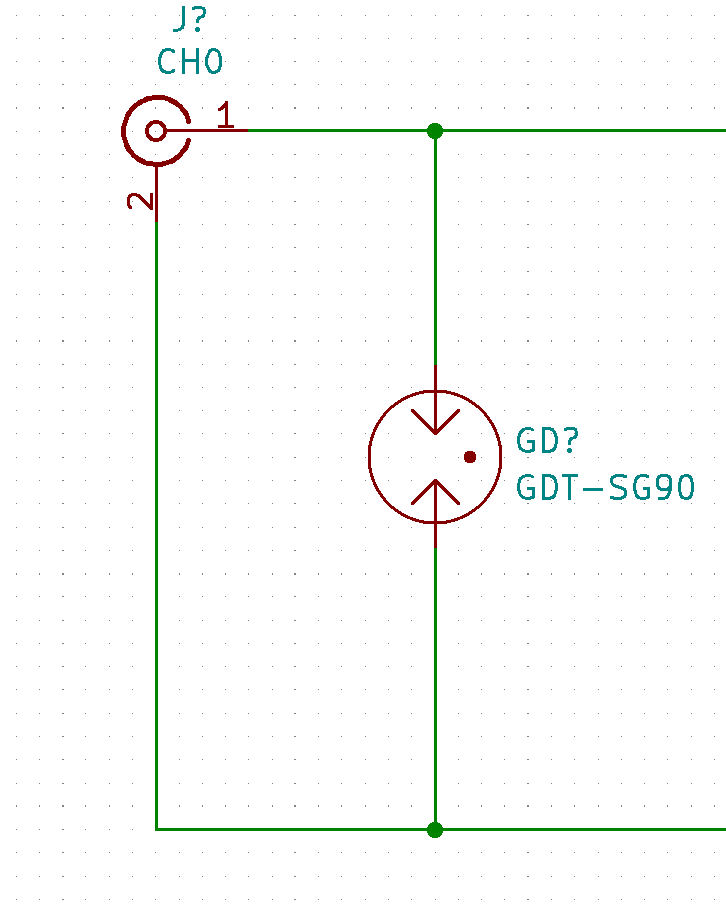
すると、非常に高性能でありながら、回路に与える影響が非常に少ない部品(ガス放電管アレスタ)がある事に気がついた。
値段もそんなに高く無い。
今回は、海外の部品で「Littelfuse SG90」を使う事にした(SMD 部品)。
※日本製は数がまとまらないと入手が難しい。(日本製を使いたいのに、このような制約で使う事が出来ない・・)
※最低発注数1000個とか無理!
レンジ切り替え
基本、RXマイコンのA/D入力(0~3.3V)なので、レンジ切り替えが必要で、以下の回路を考えてみたが、実験すると、これでは駄目な事が判った・・・
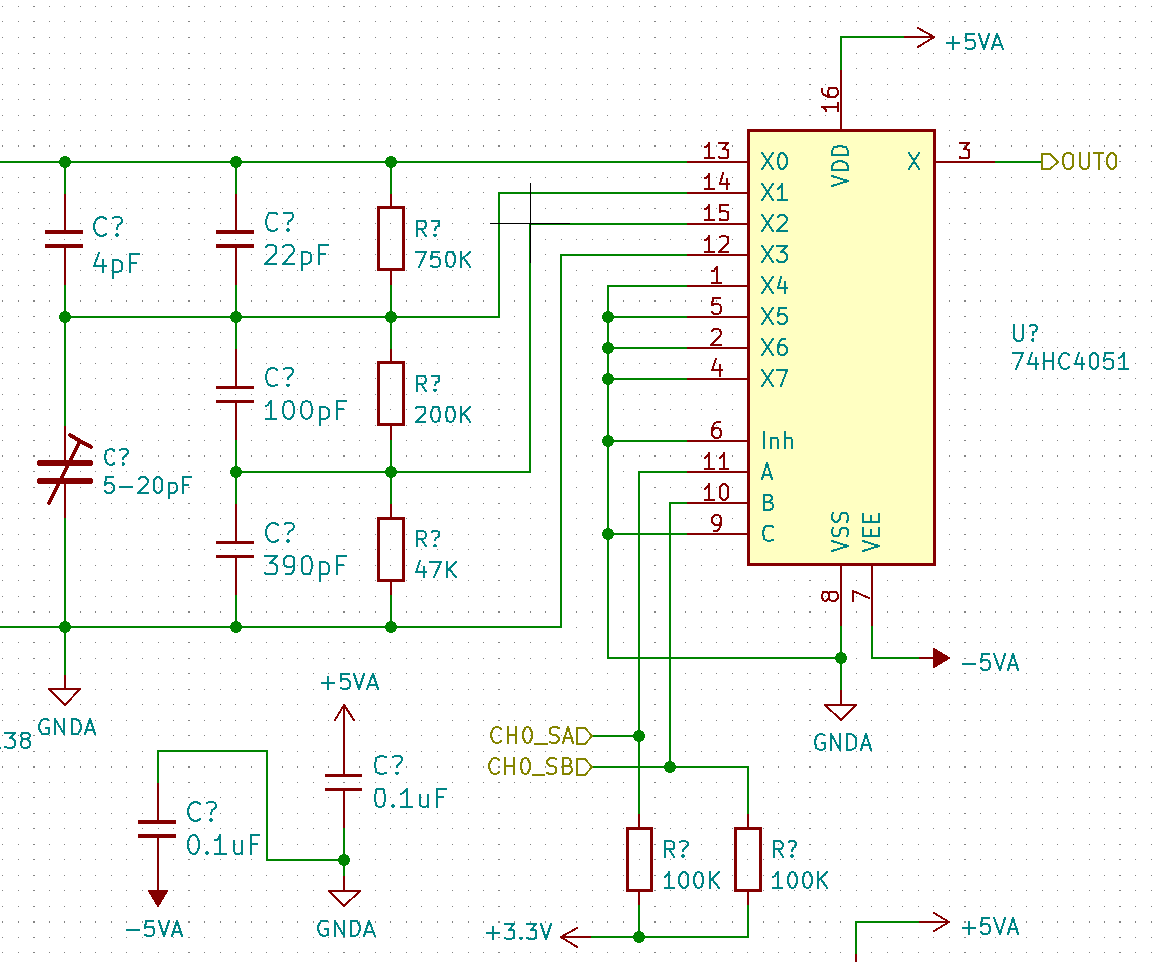
74HC4051 の入力部分には、寄生容量があり、波形が鈍る・・・
※最初は、2MHz のサンプリングなので十分と思っていたが、オシロスコープの入力インピーダンスは1Mオームと高いので、微小な容量でも効いてくる。
アナログSWを通した場合:
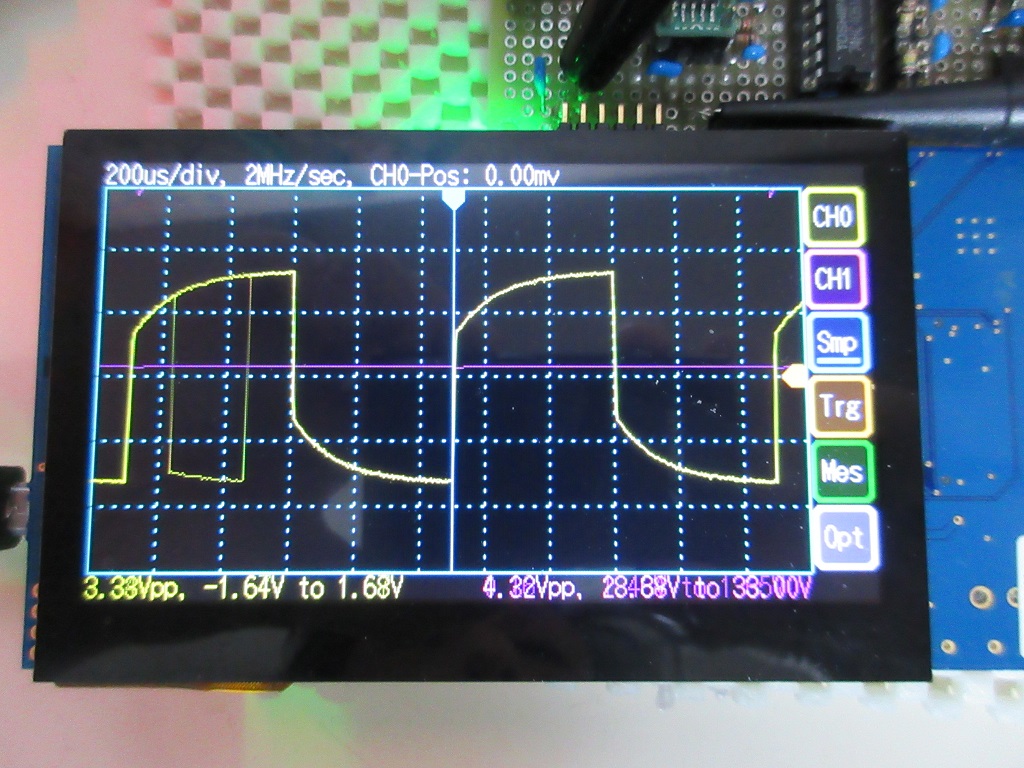
本来の波形:

結局、メカリレーにするしか無いかもしれない・・・
※一応、そんな事もあろうかと、部品は買ってあるが、回路を作るのが面倒だし、リレーをドライブする回路を追加する必要がある。
その前に、フォトMOSリレーをスイッチ替わりにして実験してみようと思う。
まとめ
オペアンプは、価格が高いので、他を探す必要がある。(一応候補は見つけたが、実験しておく必要がある。)
ガス放電管アレスタは、Digikey から購入する事になると思うので、キリが良いところで、まとめて発注する。
本当は、PCB のトラックを引くところまで済ます予定だったが、レンジ切り替えの問題で、先延ばしになった。
今回はここまで、別件もあり、中々集中する事が出来ない・・