クワッドコプターは、機械的な構造がほぼ無く、巧みな原理で飛行するのでクールで好きだ。
また、コンピューター制御(フライバイワイヤ)と密接に関係していて、電子回路と切っても切れない関係にあるのも良い。
だからと言って、機械的な構造を駆使して飛行するヘリコプターが嫌いな訳では無く(むしろ好き♪)非常に憧れる~(内燃機関が好きな理由も同じような感じだろうか)
前から、自分で飛ばしてみたくて、小型の室内ヘリなど買う寸前までいった事があるけどー、難しそうだし、際限無くはまりそうでスルーしてきたー。
HobbyKingと言うショッピングサイトがある、主に模型関係の部品を扱っているのだけど、
値段が信じられないくらい安くて、日本では買えないパーツや、面白い試みのパーツが盛り沢山、一番の問題は日本からでは送料が割高になってしまう事くらい・・
※幾ら以上だと送料無料とか、日本国内なら安全確実に安い料金で何処でも送れる、この「送料」が高い現実に、何度も躊躇するのだが・・
でも良く考えて「まとめて」買えば、どうにでもなるかもしれないと思い込む事にする、利用しない手は無いww
HobbyKing は色んなとこにリンクが溢れていて、何かの拍子にウィンドウショッピングを繰り返す事も多くて、「欲しい」欲求が抑えられないよー
そんなこんなで「HK-450」このヘリコプターは、450 サイズの規格で作られたヘリなのだがー、え!?、って値段で売られている。マジで・・・
この値段なら買ってもしょうがないなww、で、後先考えずにとりあえず買ってしまった・・
「本体」だけでは、飛ばないので、モーター、バッテリー、サーボ、ジャイロ、ESC 、必要そうな物を全て購入してしまう。
※それなりの出費だけど、マイクロヘリより本格的なヘリが手に出来る。
ヘリコプターの事なんて何も知らないけど・・・
それが、昨日届き、情報を調べながら、組み立て始めたので、その顛末をここに書いておこうと思う。
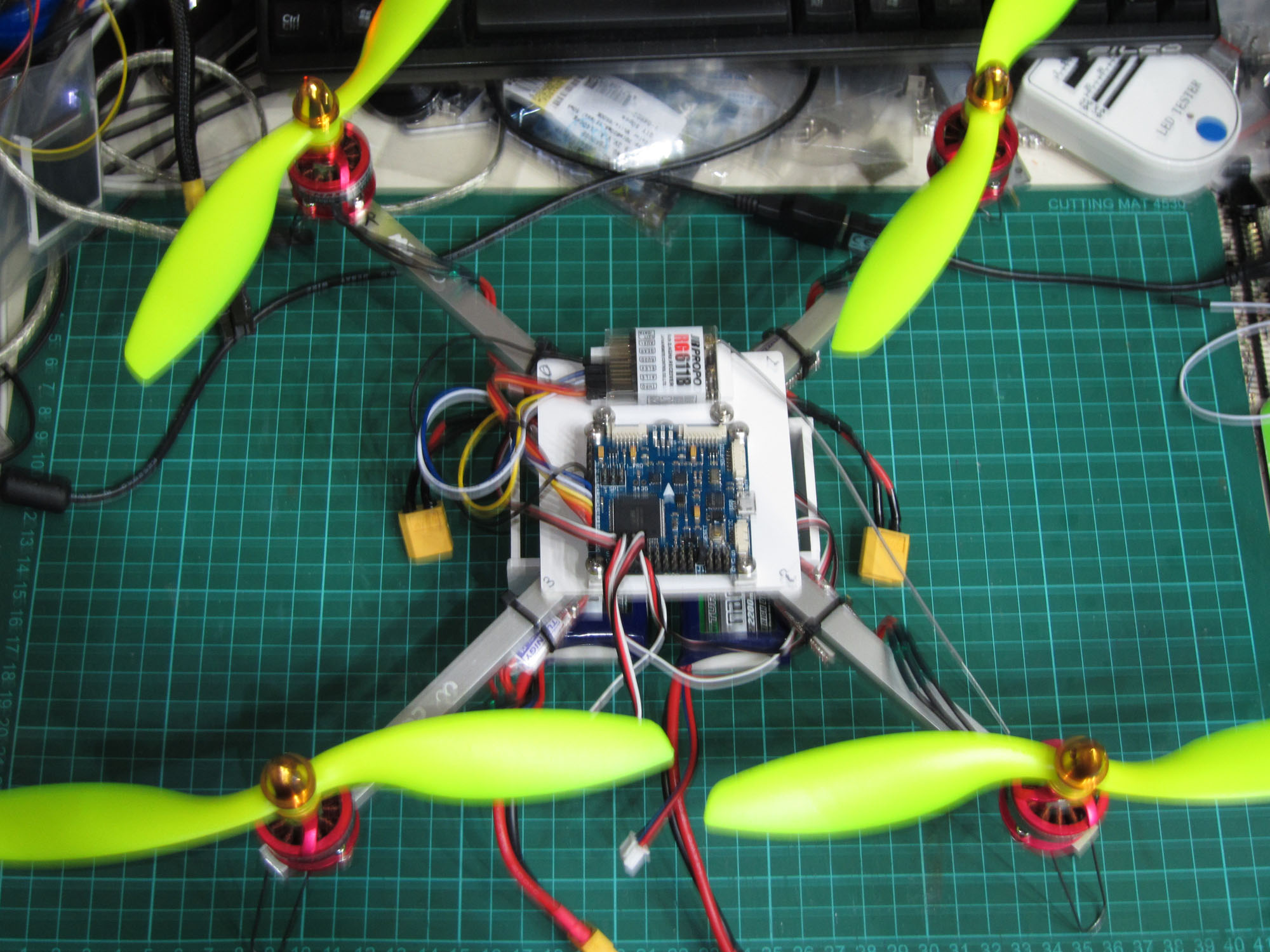
組み立てがある程度出来てしまったけどー
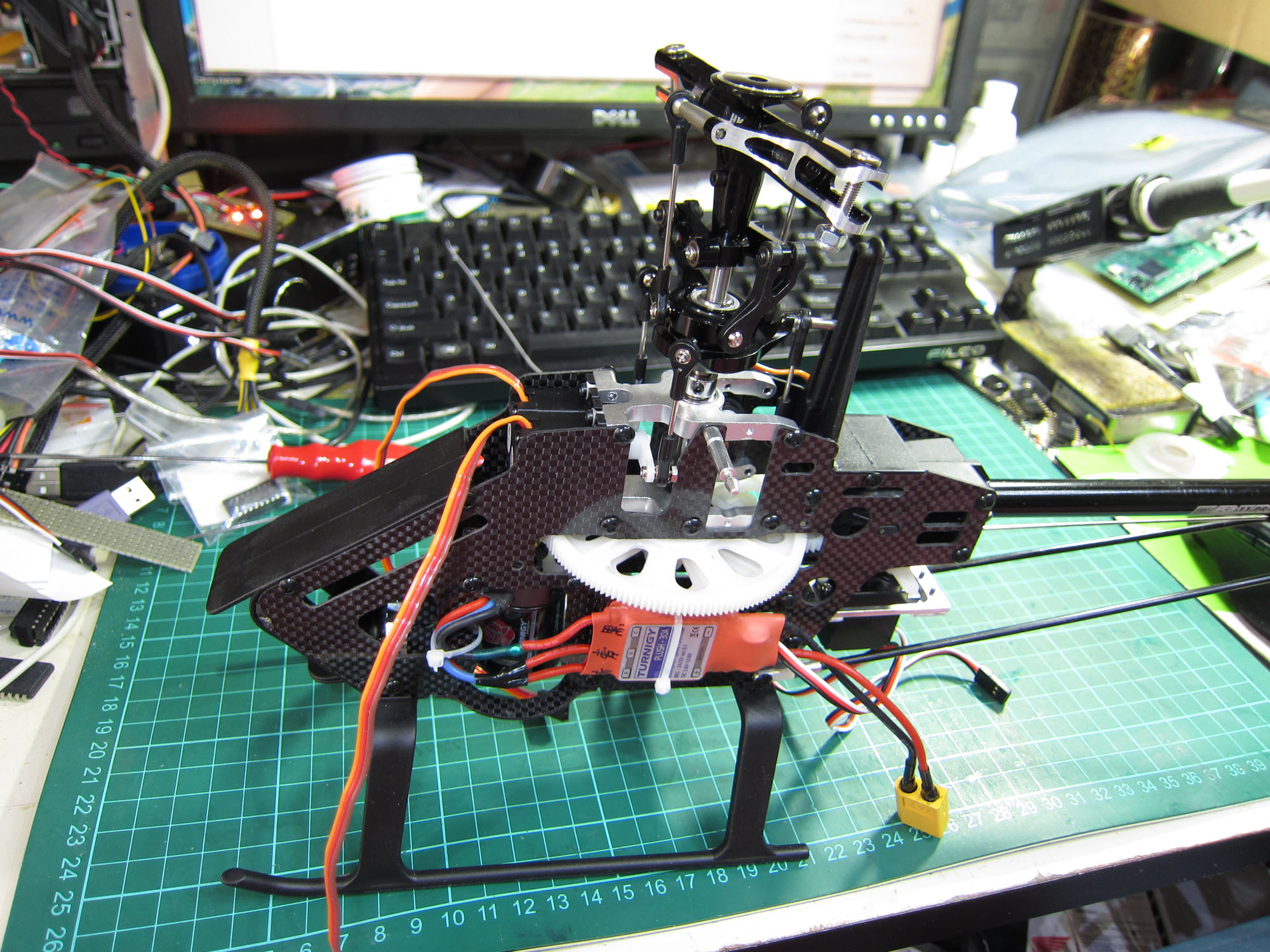
こんな感じ~
「何故フライバーレスなのかー」
ヘリコプターにはジャイロ(ローター制御)が必須だけどー、フライバーレスは、それより厳密な制御が必要で、より電子化された制御が必要な事からー、クワッドコプターに近いのかもしれない。
「ヘリコプターは飛ばすのが難しい」これは、昔から言われて来た事なのだがー、ジャイロや加速度センサー、マイコンによる姿勢安定制御ソフトウェアーの進歩が、この常識を変えようとしている。
※自分も姿勢制御ソフトウェアーを作ってみたい、研究してみたい~
↑この辺りも、あって研究目的で手を出したのもあるかもしれないwww
「安さと品質の関係」
本体は確かに安いけど、それだけでヘリが飛ぶハズも無い、「安物買いの銭失い」と言う言葉もあるけどー、日本の大手のように、アフターサービスなどコストがかからない分、空気が読める人だけに売る姿勢は、面白い。
キットには説明書は一切入って無い、聞く所によると、部品が足りないとか余分な部品が入っているとか、様々らしい、自分で考えて、調べて、スキルを上げて切り抜ける事が出来る人にだけ楽しめるものかもしれないww
もはや、ヘリを飛ばすのがゴールではない!作る過程がアドベンチャーゲームだwww
しばらくの間、それを含めて楽しむ事にしよう~♪
「キット以外に何が必要なのか?」
・1.5mm スクリューキャップドライバー(レンチ)
・2.0mm スクリューキャップドライバー(レンチ)
※一般的には、「6角レンチ」と呼ばれる事が多いです。
・小型プラスドライバー
・棒ヤスリ
※100近で売っている200円の「ダイヤモンド粉末入り」が良いです。
・2mm のドリル
・外形3mm、内径2mmのアルミパイプ
※サーボの固定は2mmのネジだけど、買ったサーボのマウントはラバーで固定するタイプなので、カラーを自作する。
・ヒシチューブ
※モーターを ESC を接続する場合、「直」で繋ぐので、ヒシチューブを被せる、テープで巻くより綺麗で確実
・バッテリーと接続するコネクター
※ESC には、バッテリーのコネクターが付属しないので、バッテリーに合ったコネクターを別途用意する。
・2×8mmネジ
※サーボホーンにリンケージを固定するビス、短すぎ!、タッピングビス的に使うのかも知れないけど、緩むのが不安なので、ビスとナットで固定。
・他に一般的な工具や材料など
※近くのホームセンターで、1本250円で、1.5mm のドライバーを買ったけど、軸がねじれてしまい、思った力で締められない、先端だけ 1.5mm で、中間は太くて剛性がある物が良いでしょうか。
※2mmの方も、ねじれる傾向はあるけど、ギリギリ我慢できるかも。

「サーボマウントカラーの製作」
今回買ったローター用サーボは、コストの関係で、HobbyKing 製メタルギアーアナログサーボサーボマウントは、ラバーで固定するタイプなので付属の2mmネジでは全く合わない、そこで、アルミパイプを加工してカラーを作る事にした。
※しかし、1個4.55ドルって・・・安!
まず、外形3mm、内径2mmのアルミパイプを用意する。(近くのホームセンターで、1m、199円でした)
・3mmくらいでカットします。
※カッターを垂直に押し当てながらゴロゴロパイプを転がすと、柔らかいアルミなので意外と綺麗に切れます。

↑ちょっと失敗、でも、1000mmもあるので、何回でもやり直せますww
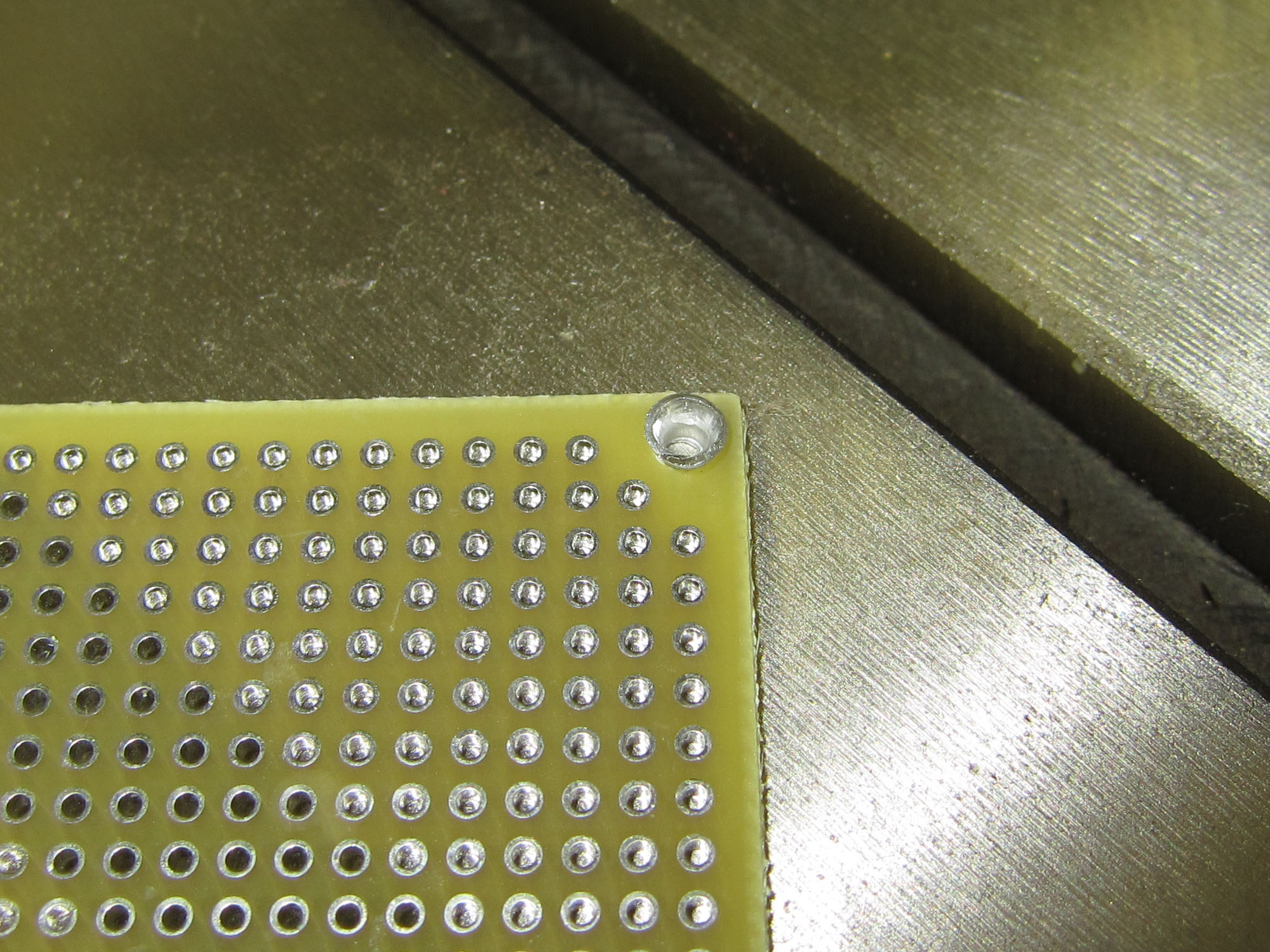
・何か丁度良い厚み(1.5mmくらい)の板を用意して、3mmの穴を開け、そこにパイプを入れます。
※電子工作用のユニバーサル基板が1.6mmで、角に3mmの穴が開いているので利用しました。
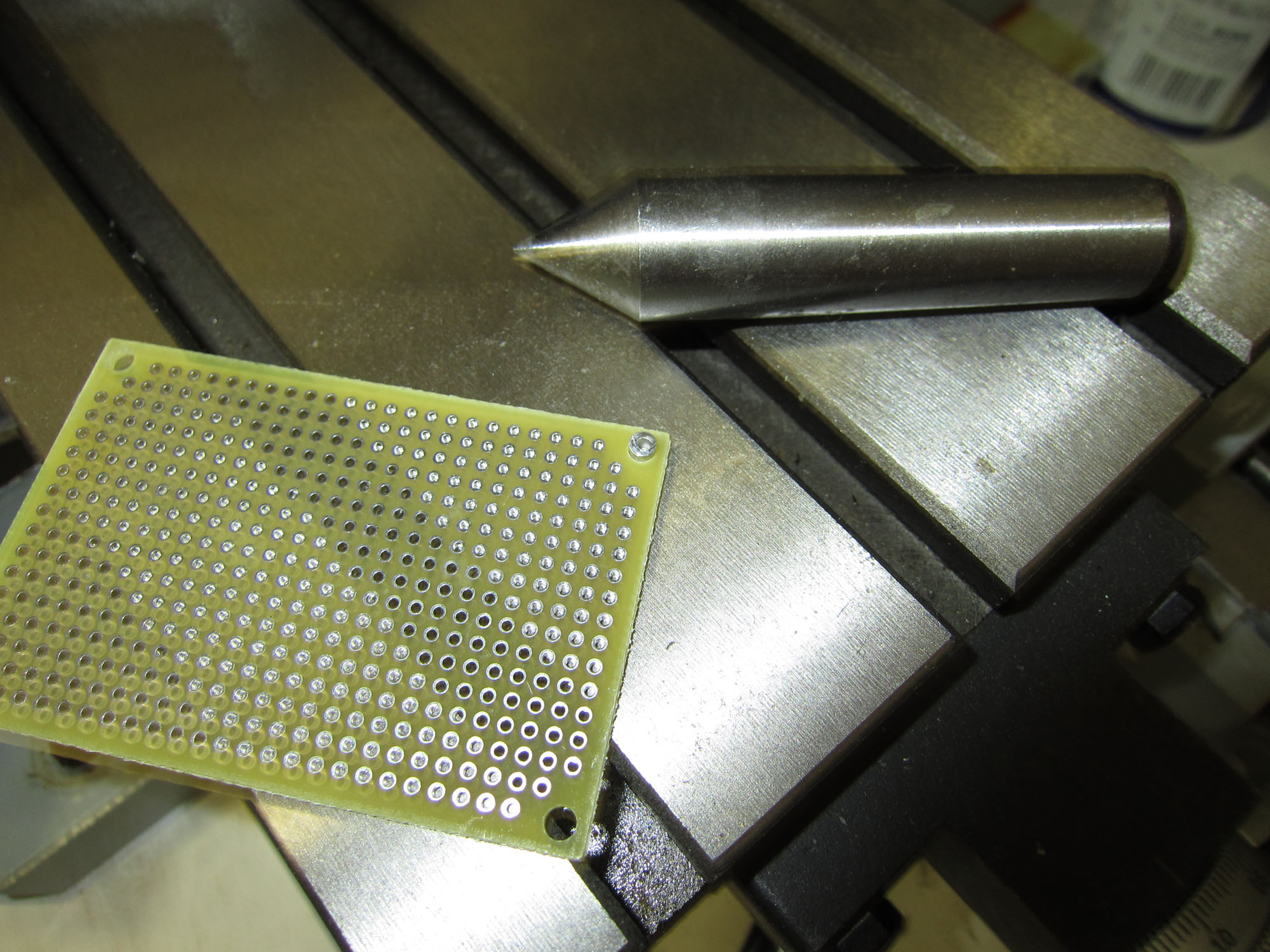
↑パイプの口を広げる為に、先の尖った円錐状の物を用意します、写真に写っているのは、旋盤のレースセンターですが、ポンチのような物で良いでしょう。
・板から飛び出たパイプの先端を、円錐状の物で広げます。
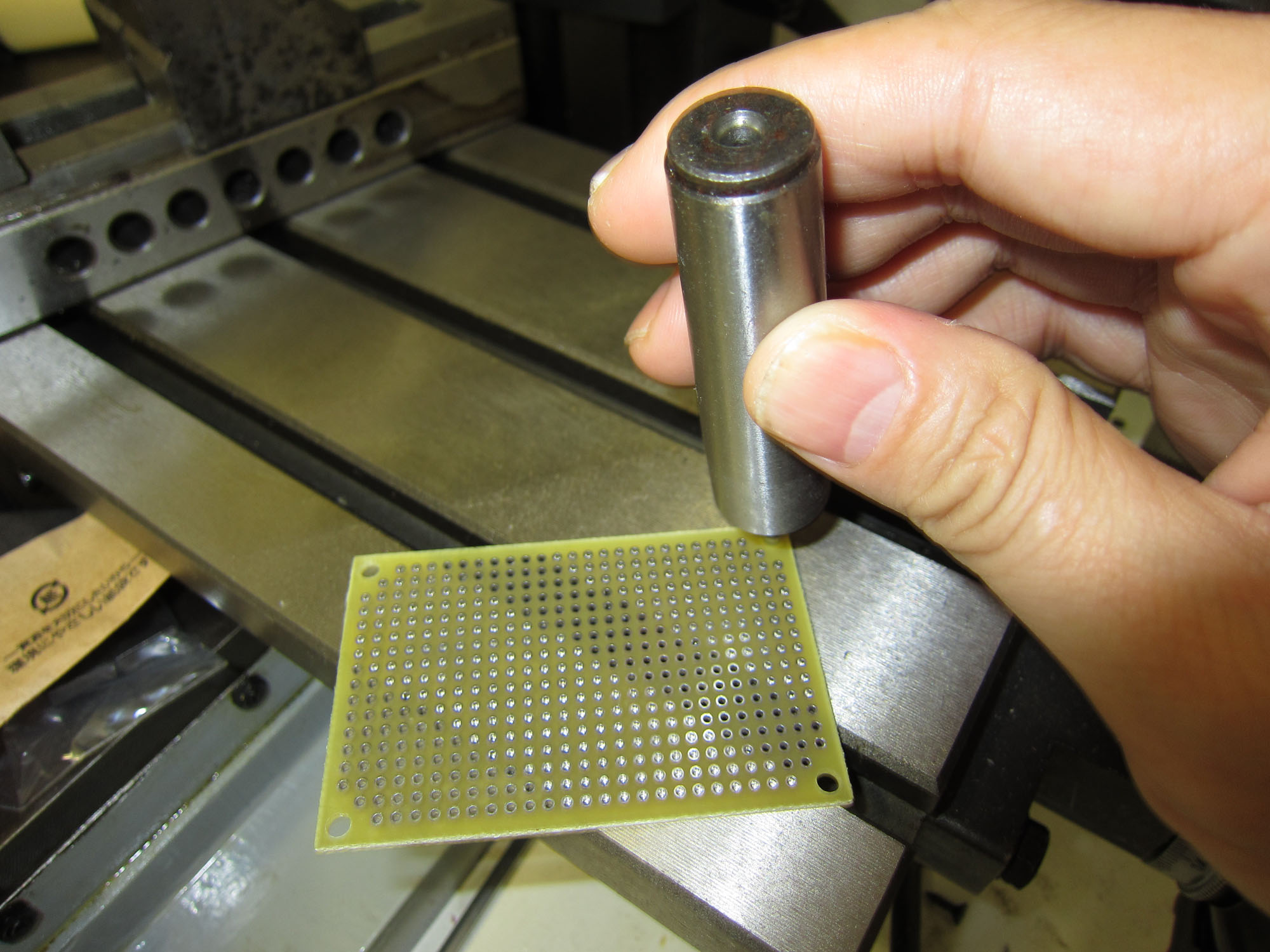
・さらに、平らな物で先端を潰して完成です。
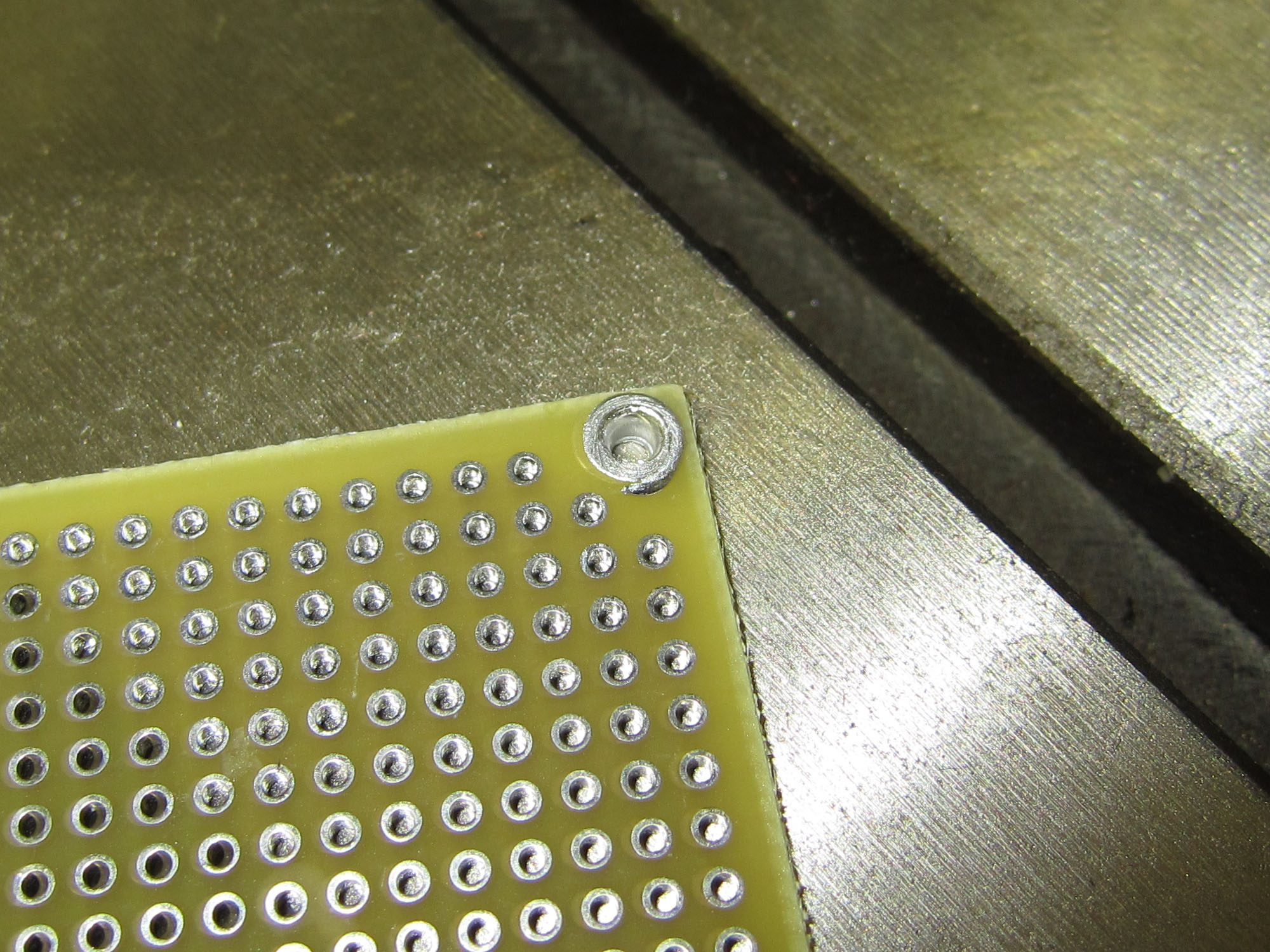

力の加減があるのですが、何回かやれば思ったように創れます。
全部で6個必要です。
「テールブレード用サーボマウント」
HK-450 では、テールブレードのピッチ変更用サーボだけ、高速な物を要求しています、理由は良く判りませんが、通常の(フライバーレスでは無い)ヘリコプター用ジャイロが要求する仕様のように思います。
一応、高速タイプのデジタルサーボを選択しました。
トルクが1.8キロなので、少し弱いのかもとも思いましたが、ここに大きな力が働くとも考えられません、しかしながら、サーボのブラケットは大きな物が用意されていて、このサーボはそのままでは取り付けできません。
そこで、アルミの板を切って、サポートを作りました。
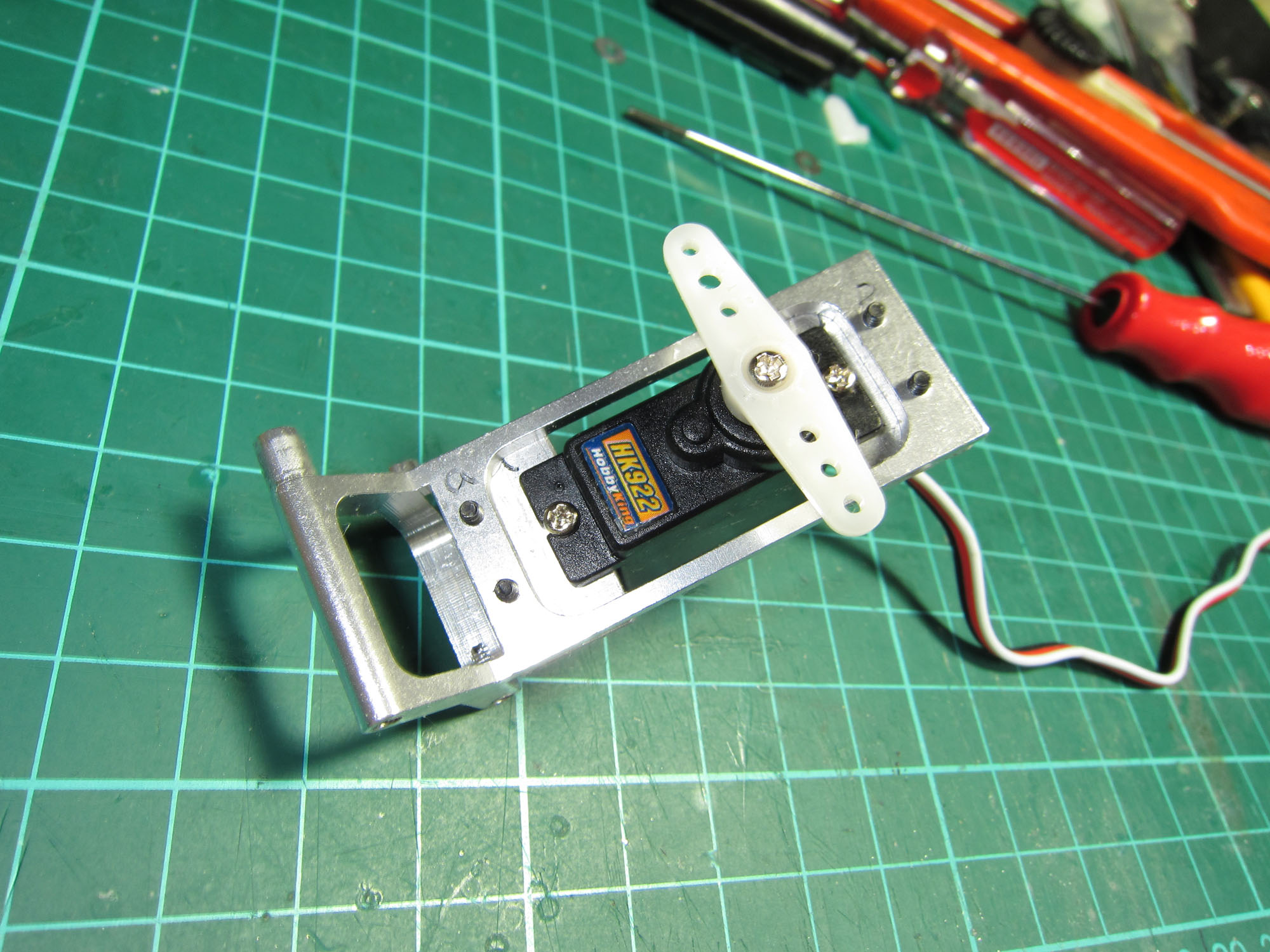
ホームセンターで売られているアルミは、柔らかく加工が楽で安いので気軽に使えます、但し、このくらいの厚さ(1.5mm)があるとカッターで切る訳にもいかないので鉄ノコで切り、端面をヤスリで仕上げます。
「バッテリーの滑り止め」
工具の滑り止めなどの名目で売られている「例の」シートを、接着剤で、張りました。
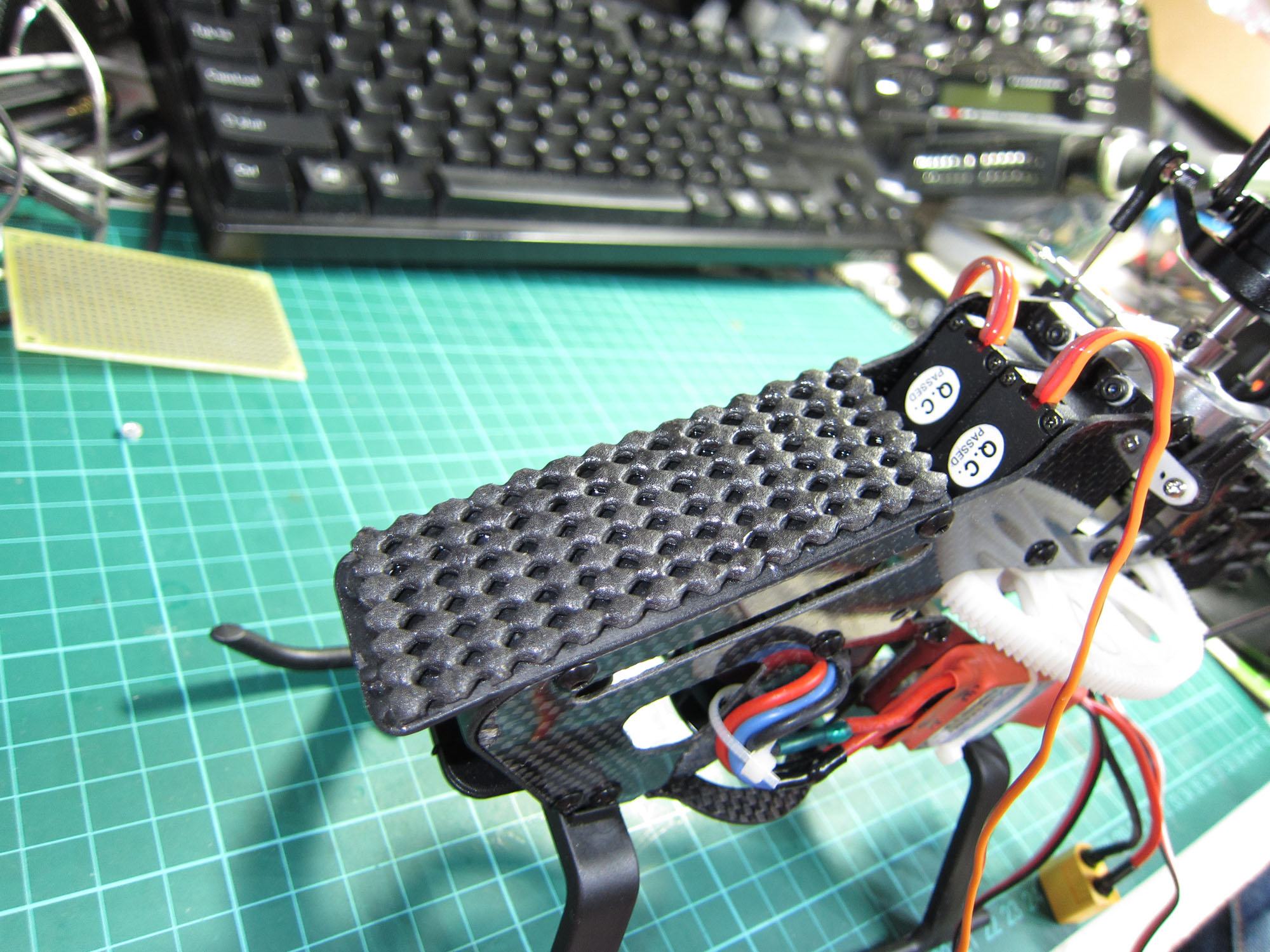

接着剤には、「セメダイン・スーパーX」を使いますww
これを知ったのは、デコ携帯に色々くっつけるのに女子が使っているのを観たのがきっかけですww
意外と柔軟で、何でも良くかなり強く接着します、「瞬間」ばかり多用していた自分には新しいです!、但し、接着には時間がかかります。
※「瞬間」も、最近ではアロンアルファでは無く、ロックタイトを良く使います、アロン何とかは、二回目くらいに使う時に固まって使えない事が多く「損」です、最後まで使えた記憶が殆どありません。
※セメダイン社最高!
「モーターとESCの取り付け」
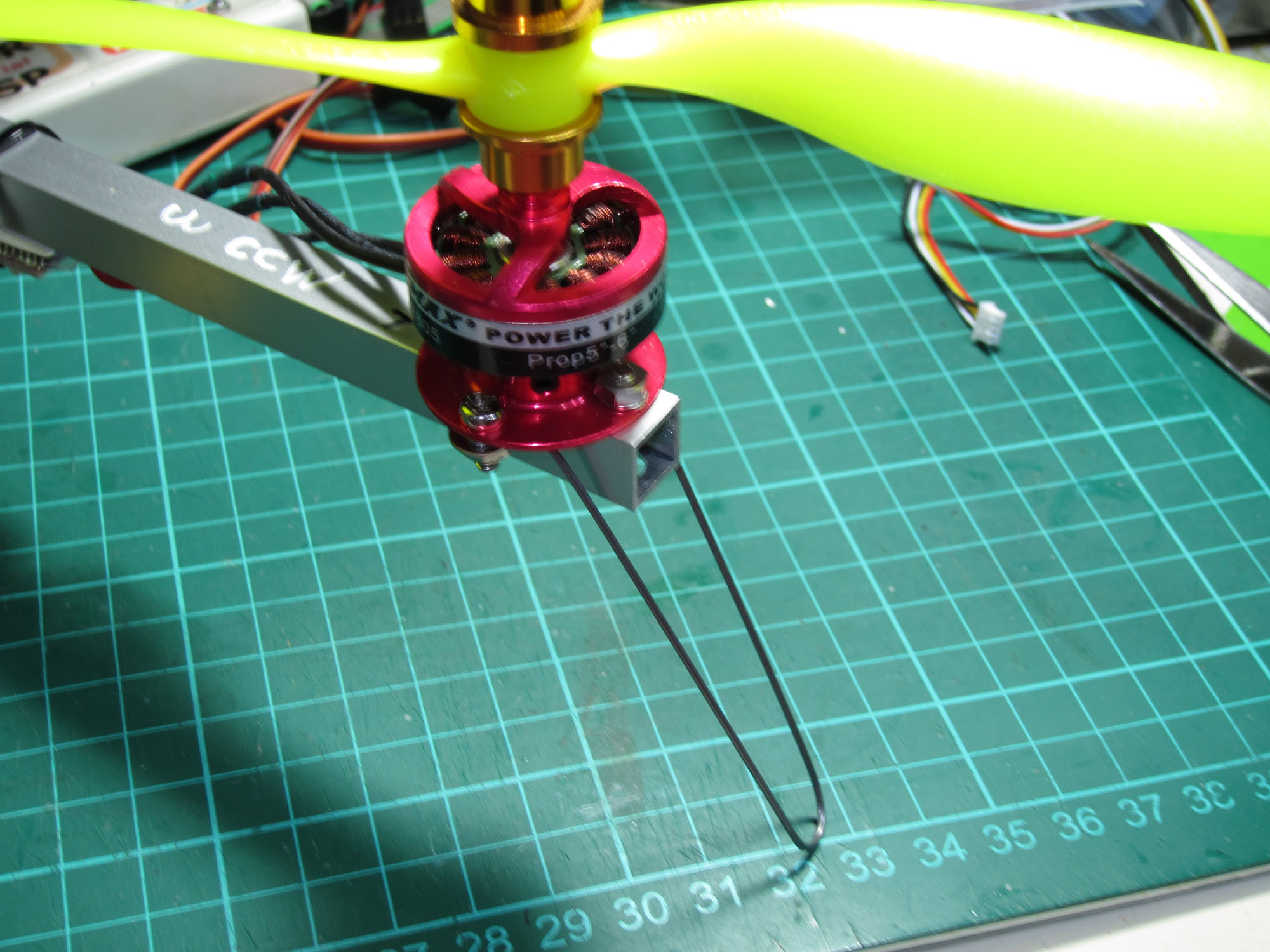
モーターは、Turnigy Typhoon 2215H Brushless 450-Size Heli Motor 3550kvにしました、特別な理由はありません、kv 値は一応少し気にして、他の人が使っているモーターと同じくらいの物を選びました。
※値段が15ドルと安いです!
ESC は40Aが推奨ですが、以前に研究用に買った30Aの物があり、モーターの最大電流が28Aなのと、薄くてマッチするのでとりあえずそれを取り付けましたが、40Aの物も買ってあります。(かなり大きい)
※足りないようなら、40A品を付けますが、しばらくは、高速で飛行させる事は無いので、多分十分と思います。
BEC出力も2Aありますから、サーボ4個程度なら十分です。
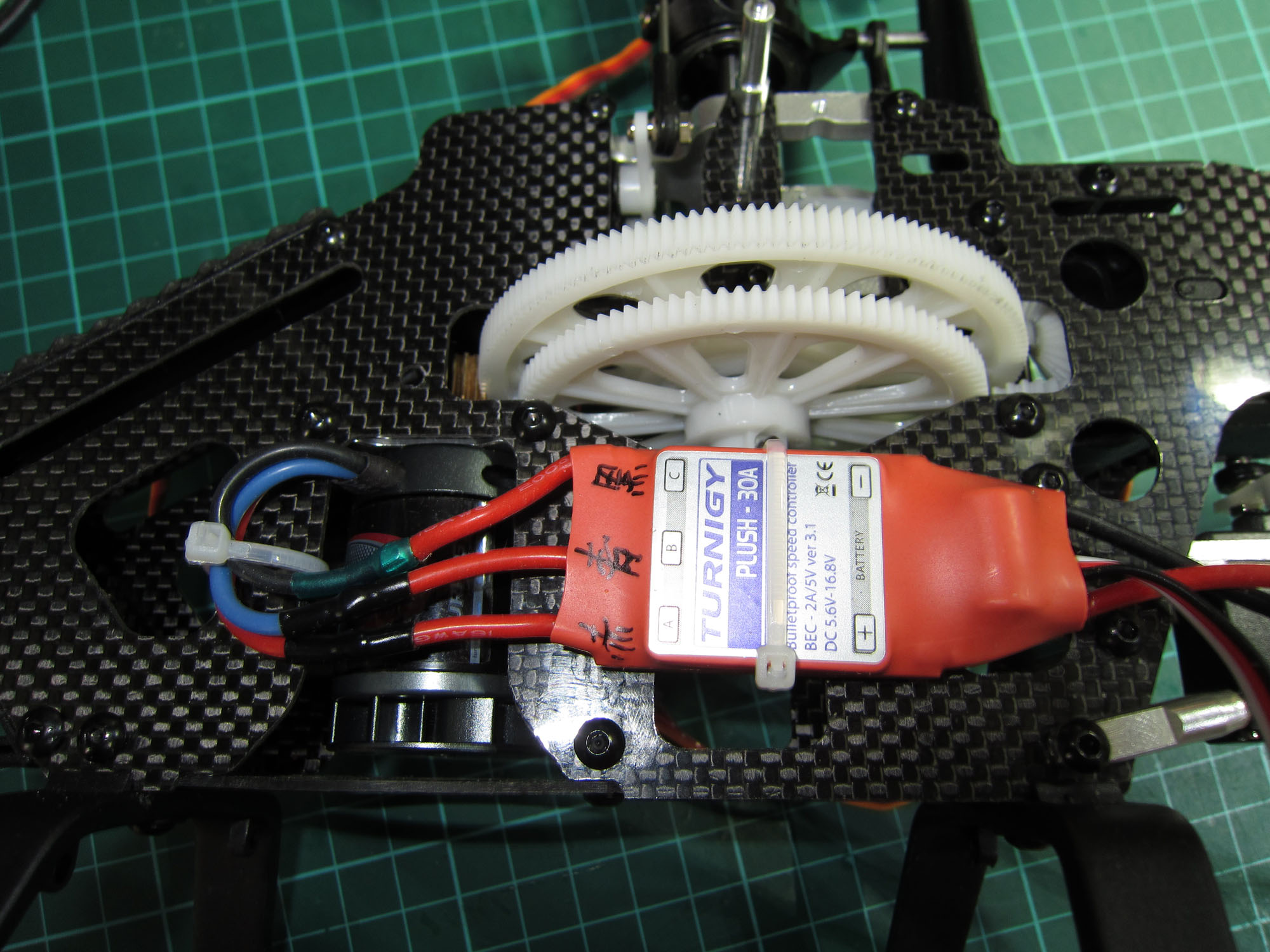
※モーターのハーネス、1本だけ、細すぎるチューブを使った為失敗しているww
モーターとの接続は、回転方向があるので注意しなければなりません、仮に繋いでみて、回して、回転方向を確認します。
※メインのスパーギアには、自転車のようなクラッチが入っていて、逆回転だと空回りするので、どちらに回転するのが正しいのか直ぐに判ります。
※逆回転なら、3本のうち2本を入れ替えます。
このモーターには最大28Aもの電流が流れるので、接続はハンダで、ガッチリ行います、接続した部分がショートしないように、ヒシチューブで絶縁します。
ヒシチューブは熱で収縮するのですが、ガス半田コテのホットブローアタッチメントを使って処理します。

※コテライザーは、ガス半田こてで、非常に便利です、先端のアタッチメントも色々あり、便利!
今回はここまで~
サーボとのリンケージとか、どのように調整するのか不明な事も多く、その辺りは適当に流しましたが、これから地道にやっていこうと思います。
このヘリコプター、意外に軽いのでビックリしますが、剛性が必要な部分はアルミ(ジュラルミン?)の削りだし、フレームもカーボンで出来てます、この造りでこの値段はやはり脅威です、しかし元のヘリコプターの設計が良い事は凄く良く判ります。
上手く飛ばせるようになったら、オリジナルが欲しいですねー
次回は、ジャイロの設定などを中心に紹介する予定です。