RX65N Envision Kit で実現する、ファミコンエミュレーターだけど、内臓メモリの空きエリアなどの問題で、動作させる事が出来るカートリッジファイルに大きな制限があった。
それもあって、実用性が乏しいので、機能を追加する事に消極的だった。
なので、本来持っている機能(ステートのセーブ、ロードなど)実装していなかった。
以前のバージョンでは、最大でも1MビットROM1個分(128Kバイト)までしか動作出来なかった。
※1Mビット1個でもメモリ不足になるカートリッジファイルもあった・・
最近、nes ファイルのロードと、メモリアロケーション関係を整理(nes_rom.c)、修正したら、実は2Mビット(256K)まで動作可能な事が判った。
※何で、こんな「無駄」な事をしていたのか理解に苦しむが、元のソースコードは、ESP32用だったので、ESP32 用になっていた物を Windows で動かす実験をした際に、適当な実装になっていたのがそのまま残っていた・・・
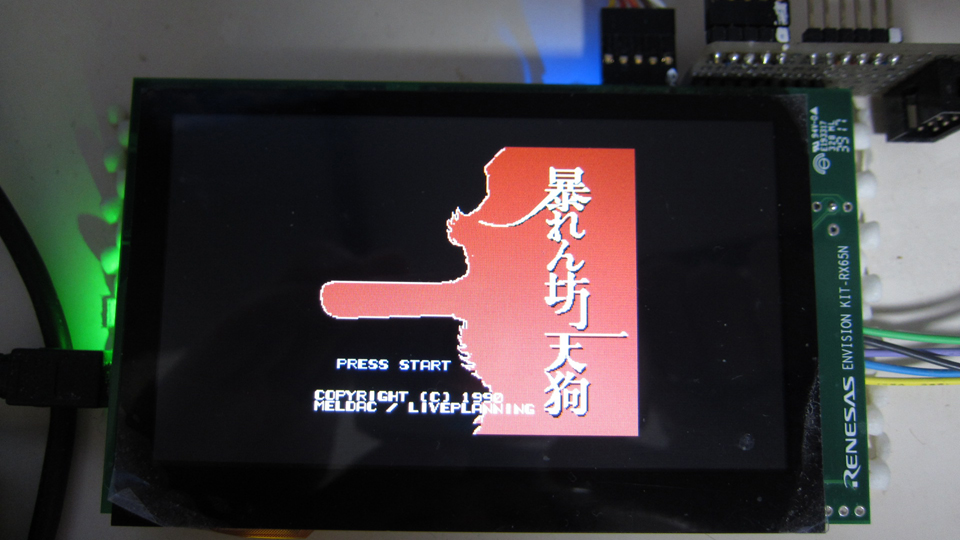
2Mビットまでとなると、過去に自分がプログラムを担当した「暴れん坊天狗」が動く!(RX65NでNESEMUを走らせるゴールのようなもの)
※かれこれ30年前のファミコン向けゲーム(NES版は、「Zombie Nation」)
※1Mビット(PRG)+1Mビット(CHR)、MMC3バンク切り替えという仕様
※生産数が少ない為、今では貴重なカートリッジで、中古価格は意外と高い、確か、まだ実家に未使用品が1個あったハズだが、捨てられているかもしれない・・
※国内版と海外版でタイトルが異なるが、本来、海外版向けとして開発していたが、国内で売る場合に、京都のN社の「倫理規定」が通らず、社長の一存で、国内向けにタイトルを変更したものだった。
今でも覚えているが、社長が、新聞の番組欄で「暴れん坊将軍」を見て、それと、その当時N社が販売していた「花札の天狗」をかけて出来たタイトルで、自機のキャラクターも、落ち武者の顔から天狗になった・・・
まぁ、B級とか、糞ゲーとか揶揄されるが、結構真面目に丁寧に設計され作っている。
感覚と理論的なバックボーン、バランスで出来ている。
※サウンドドライバーや、スコアのオーサリングツールも自分で実装していて、ドット絵ツール以外は全て一人でコーディングした。
このゲームは、音楽も高く評価されている。
源平のN氏が最後に作曲をしたファミコンの作品だと思う。
※楽曲は、N氏とO氏の共同作業だった。
※ドラムやスネアなどで使っている、デルタモジュレータのビットストリームは、当時交流があったU氏が、FMタウンズでサンプリングして作成したデータが元になっていて、音楽や企画を担当したO氏が、それのスタートアドレスを微妙にずらしてバリエーションを作り色々工夫して使っている。
「NOAのテスターにNESでは最高の音楽」と言ってもらった。
※国内版(海外版は修正されている)には、バグがあり、割り込み内で、プログラムバンクを切り替えていて、元に戻し忘れているので、微妙な確率で、暴走して、奇妙な動作をする事がある。
このバグは処理が重い状態じゃないと発生しないので、デバッグでは見つける事が出来なかった・・・
驚く事に、ネットで流通している nes ファイルの中には、このバグにパッチを当てて修正しているものもある。
※エミュレーターでは未定義動作で停止してしまうのだろう~
RX65N のパフォーマンスは素晴らしい、ファミコンのハードウェアを完全にエミュレーションできる。
音も完全に近い状態で再生される。
そして、ステートのセーブとロード機能も実装しておいたので、バッテリーバックアップ機能が無いカートリッジでも、途中の状態をまるまるセーブして保存出来る。
※ファミコンの電源を切らない状態の再現
カートリッジファイルは拡張子が「nes」になっており、PC などのエミュレーターなどで一般的な形式を使っている。
※このファイル形式は、カートリッジのハードウェアー設定なども含まれていて、自動で、キャラジェネのH、Vリンク、マッパーのエミュレーションを切り替える。
ESP32 版と大きく異なるのは、2Mビットまでだが、カートリッジファイルを選んでエミュレーションする事が出来る(この違いは大きい)点
オーディオの再生品質がほぼ完全な事。
※ESP32 では、nes ファイルを ROM データとして、プログラムと同梱しなければならず、又、オーディオの品質もかなり低いと思われる。
エミュレータの品質が高いのは、nesemu コードが優れており、ルネサス RX65N マイコンの高機能によるところが大きいものとなっている。
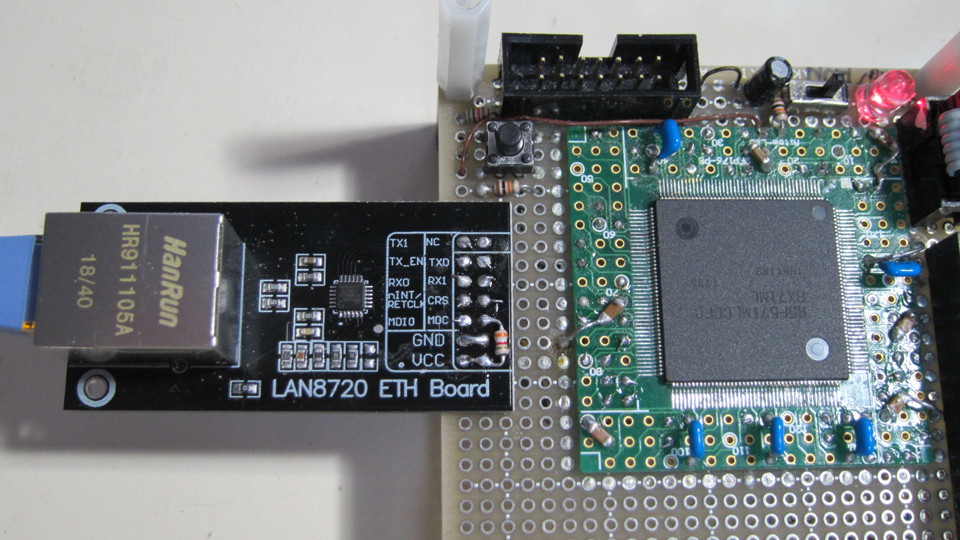
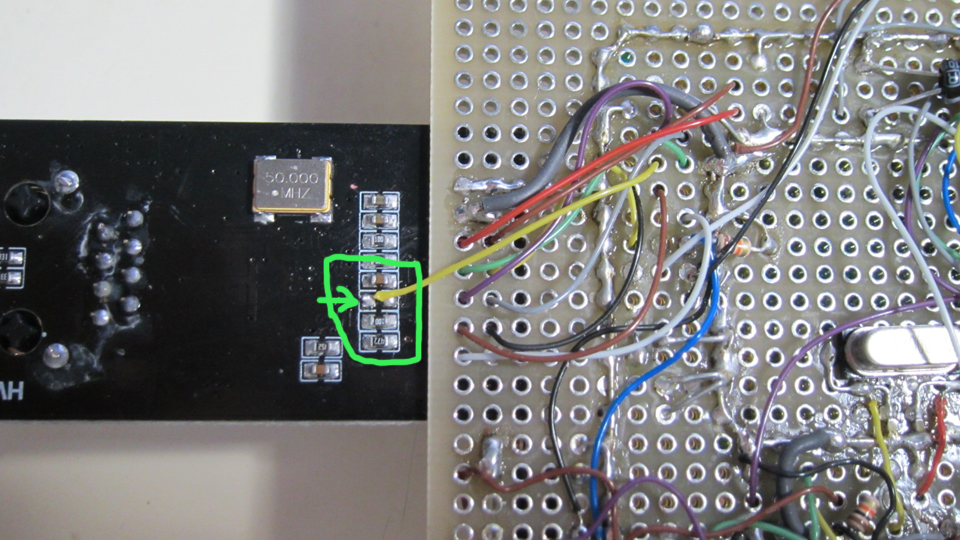
RX65N Envision Kit の改造方法は、以下のリンクを参照して頂きたい。
NESEMU_sample for GitHub
改造は、比較的ハードルが低く、プログラムをコンパイルする環境も、 gcc で、ソースコードを取得して、手順を進めるだけなので意外と簡単だと思う。
※ルネサス純正コンパイラでは、試していないが、コンパイルが出来ないかもしれない。
※RX65N にプログラムを書き込む場合、ルネサス社のツール(Renesas Flash Programmer)を利用する必要があるが、無料版をダウンロードして使う事が出来る。
ゲームの操作は、タッチパネルでは操作が難しいので、外部にファミコンと同等なゲームパッドを接続する必要がある。
※ファミコンパッドには8ビットのシフトレジスタ(CMOS 4021B)が載っており、シリアルクロック、ロード/シフト、データの3本で情報を取得する。
RTK5RX65N Start for NES Emulator
Start GLCDC
# help
dir [xxx] list current directory
pwd current directory path
cd [xxx] change current directory
nes filename
pause
reset
save [slot-no]
load [slot-no]
info
call-151
# nes GALAXIAN.NES
ROM header dirty, possible problem
ROM loaded: GALAXIAN.NES [0] 32k/8k Hcreated memory mapper: None
setting up mapper 0
reset memory mapper
# call-151
$fff8.ffff
FFF8- FF FF 0C E2 20 E0 20 E0
$e020l
E020- 78 SEI
E021- D8 CLD
E022- A2 4D LDX #$4D
E024- 9A TXS
E025- A9 10 LDA #$10
E027- 8D 00 20 STA $2000
E02A- AD 02 20 LDA $2002
E02D- 10 FB BPL $E02A
E02F- A2 00 LDX #$00
E031- 8A TXA
E032- 95 00 STA $00,X
E034- 9D 00 02 STA $0200,X
E037- 9D 00 06 STA $0600,X
E03A- 9D 00 07 STA $0700,X
E03D- E8 INX
E03E- D0 F2 BNE $E032
E040- A2 00 LDX #$00
E042- BD 05 01 LDA $0105,X
E045- DD 10 E0 CMP $E010,X
E048- D0 0B BNE $E055
$0.ff
0000- 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
0010- 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
0020- 00 00 00 40 00 00 00 24 00 00 01 00 00 14 01 00
0030- 00 00 00 00 00 00 03 20 F2 E1 F3 E9 00 01 01 00
0040- 00 00 00 01 02 00 00 00 00 00 00 00 04 00 00 00
0050- 00 00 00 00 00 00 00 00 00 00 00 21 2B 41 4A 50
0060- 59 5C 07 0F 10 00 0C 00 32 00 00 00 00 00 00 0B
0070- 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
0080- 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
0090- 00 00 00 00 00 00 00 00 00 00 01 00 00 F0 FF 00
00A0- 00 01 00 09 08 07 06 05 04 03 02 01 00 09 08 07
00B0- 06 05 04 03 02 01 00 09 08 07 06 05 04 03 02 01
00C0- 00 00 FB 07 0F 1F 3F 1F 18 3E 1C 07 00 07 0F 1F
00D0- 3F 1F 1F 3F 1F 0F 07 00 2F 00 86 20 33 00 3D 09
00E0- 23 00 77 06 F8 F9 00 00 CF E9 B0 E9 0B 0B 00 00
00F0- 00 00 0B 00 00 00 00 FF 00 00 06 90 00 00 04 02
$0.
0000- 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
$0:1 2 3 4
$0.
0000- 01 02 03 04 00 00 00 00 00 00 00 00 00 00 00 00
$400
0400- FD
$上記のように、シリアル接続により、モニターぽぃ機能が使える。
※SCI9、8ビット、1ストップビット、115200 BPS
・「call-151」でモニターが起動(「exit」で戻る)
・6502逆アセンブラが使える。
・メモリダンプや、メモリの書き換え等が出来る。
※「call-151」の意味が判る人なら、使い方は判ると思うが、上記機能くらいしか実装していない。