以前に、周波数シンセサイザ、AD9833 を試していたが、より高い周波数に対応した、AD9851も試してみた。
※最近RXマイコンばかりで久しぶりにR8Cを触った、このような実験には、小回りが利いて便利だ。
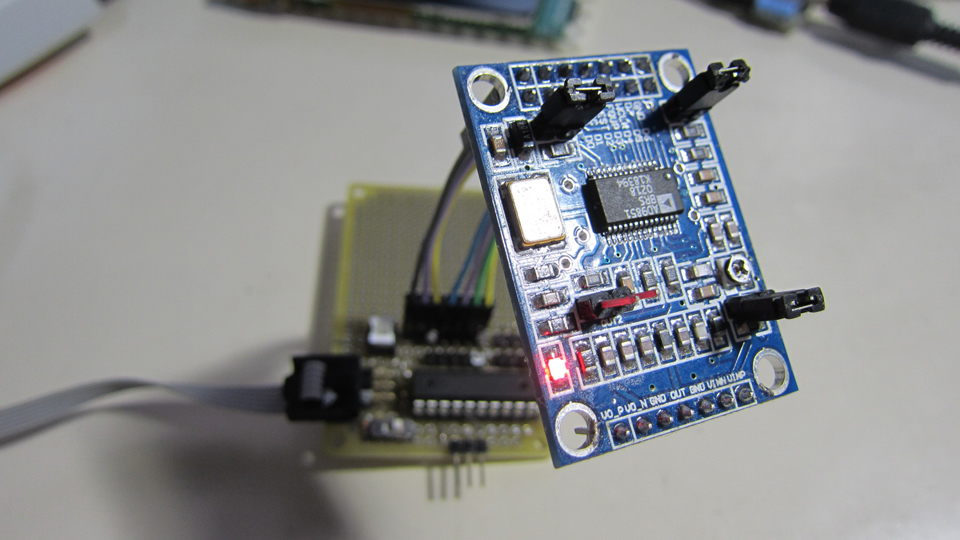
値段はかなり高く、モジュールで3500円程だった。
買ってから気がついたが、このICはサイン波のみで、三角波はサポートしていない。
※矩形波はコンパレーターがあるので作れるだろうか・・
ただ、内部は最大180MHzで駆動できる為、出力できる周波数を高く設定でき、周波数ステップも細かく設定可能。
※AD9850は最大125MHz
※AD9833は最大25MHz
※AD9851では、電源電圧により、最大動作周波数が異なる
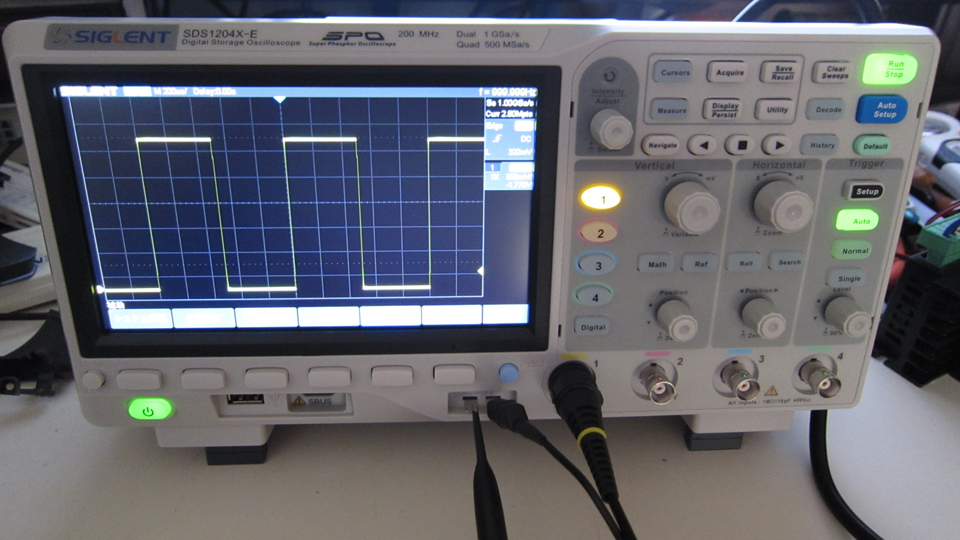
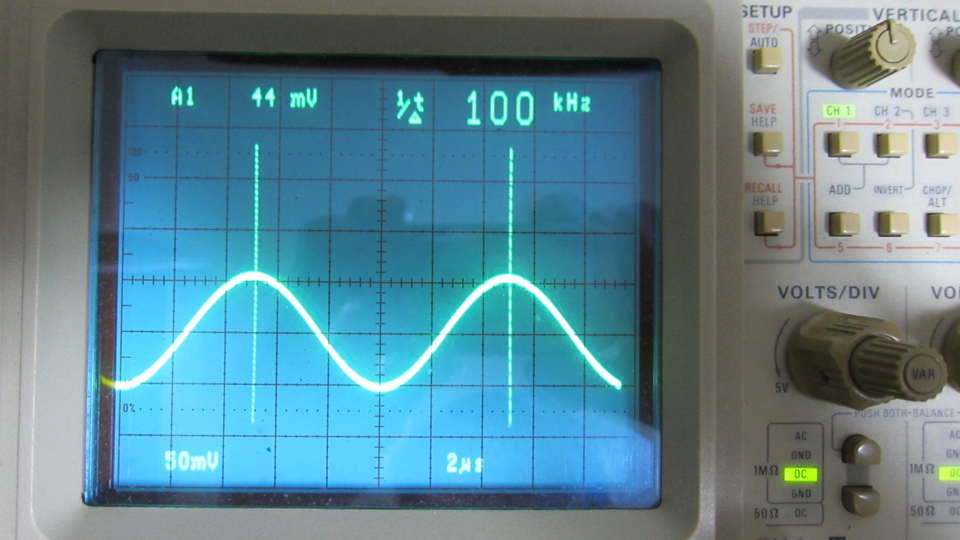
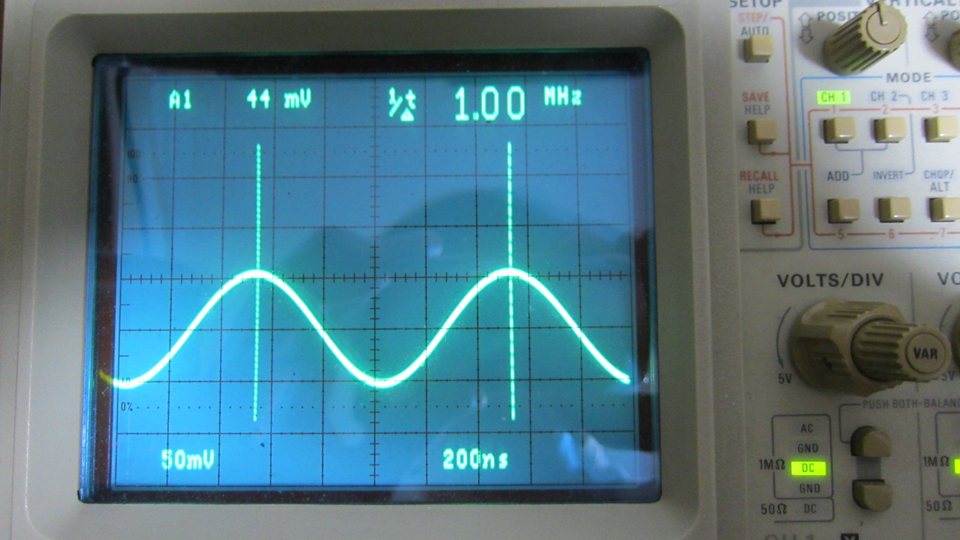
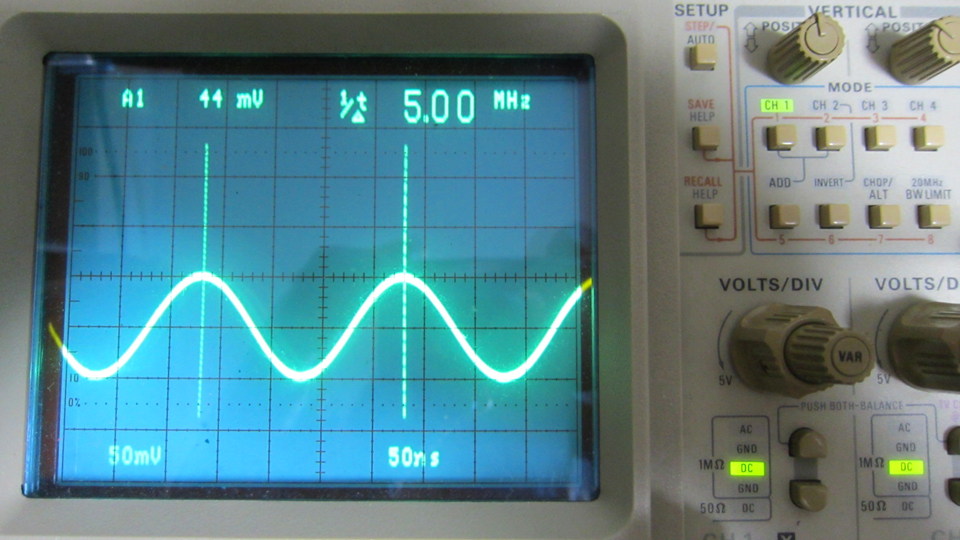
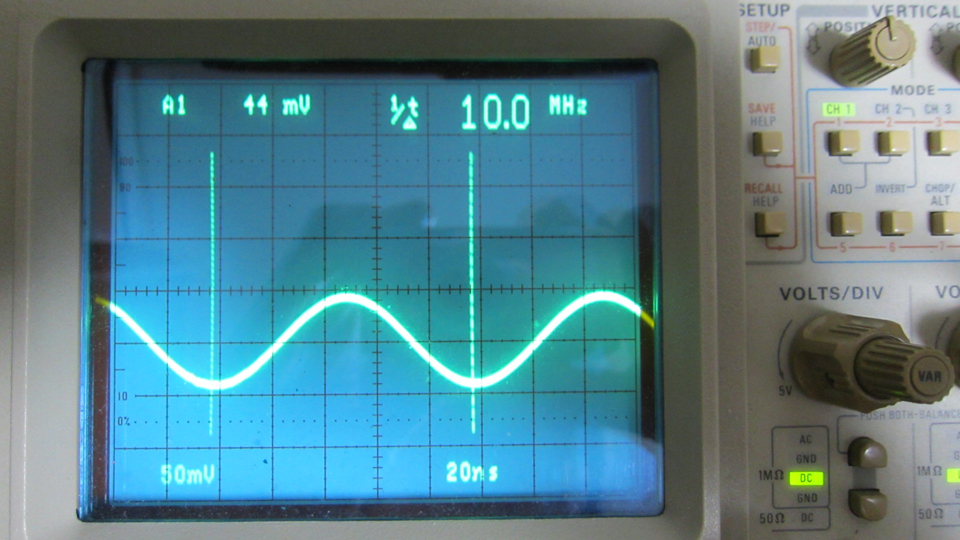
モジュールでは、出力にLCRを使ったローパスフィルタが組んであるのだが、出力する周波数によって振幅が小さくなるので、結構扱いが面倒だ・・
※10MHzだと減衰がかなり大きい。
この手のICを実用的に使うとなると、一番ネックになるのが、出力の扱いだと思う。
中心をGNDにして、+-で振幅させたいとか、出力振幅やオフセットを設定したいとかするには、外部に何らかの回路を付けたいが、マイコンで制御できるようにするには、意外と単純では無い。
いつものようにテンプレートライブラリとしたが、周波数の計算で、倍精度の浮動小数点を使っている。
本来整数計算だけで出来ると思うが、参考にしたライブラリの手法をそのまま流用した、時間がある時にでも考えてみたい。
ICの制御は基本4本の制御線が必要で、外部基準発信器をどのようにするかを設定出来るようにしてある。
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief AD985X テンプレートクラス
@param[in] D7 ポート・クラス
@param[in] W_CLK ポート・クラス
@param[in] FQ_UD ポート・クラス(FQ_UpdDate)
@param[in] RESET ポート・クラス
@param[in] BASEC ベースクロック(AD9850:125, AD9851:180)
*/ //+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
template <class D7, class W_CLK, class FQ_UD, class RESET, uint32_t BASEC>
class AD985X {
...
public:
//-----------------------------------------------------------------//
/*!
@brief レジスターを設定
@param[in] w0 W0 レジスター値
@param[in] freq 周波数
*/
//-----------------------------------------------------------------//
void set_reg(uint8_t w0, float freq)
};
サンプルでは、外部OSCが30MHzで、内部の6倍PLLを有効にする。
// P1_0(20):
typedef device::PORT<device::PORT1, device::bitpos::B0> D7;
// P1_1(19):
typedef device::PORT<device::PORT1, device::bitpos::B1> W_CLK;
// P1_2(18):
typedef device::PORT<device::PORT1, device::bitpos::B2> FQ_UP;
// P1_3(17):
typedef device::PORT<device::PORT1, device::bitpos::B3> RESET;
// 180MHz
typedef chip::AD985X<D7, W_CLK, FQ_UP, RESET, 180> AD9851;
AD9851 ad9851_;
{ // AD9851 開始
ad9851_.start();
ad9851_.reset();
}
char tmp[32];
command_.get_word(1, sizeof(tmp), tmp);
float a = 0.0f;
if((utils::input("%f", tmp) % a).status()) {
ad9851_.set_reg(0b00001001, a); // Phase: 1, PLL 6x
} else {
error = true;
}
市販の周波数ジェネレーターはそれなりに高いので、安価な実験用発信器が欲しかったのだが、実用的な物にするにはそれなりの工夫が必要で、それなりに考える必要がある。
AD9851は内部180MHz動作なのだが、三角波も出せないので、AD9833の方が良いのかもしれない・・・
AD985X.hpp
github AD9851_sample