今まで、色々と失敗続きで、まともに飛行していない・・
以前に買った、コントローラーは、ホバリングもまともにできないし、設定も色々変えてみたが全く上手く行かない・・・
よくよく調べてみると、ジャイロがどうもおかしく、モニターで出力の変化を確認してみたがー、正常に機能していないようだった・・・
無理やり飛行させてみたがー、ホバリングもまともに出来ないような状態の為、速攻で墜落、壊してしまったのだったー
それから、月日は流れー、再挑戦の為、ホビーキングで、新しいUAVのコントローラーを買ってみたー
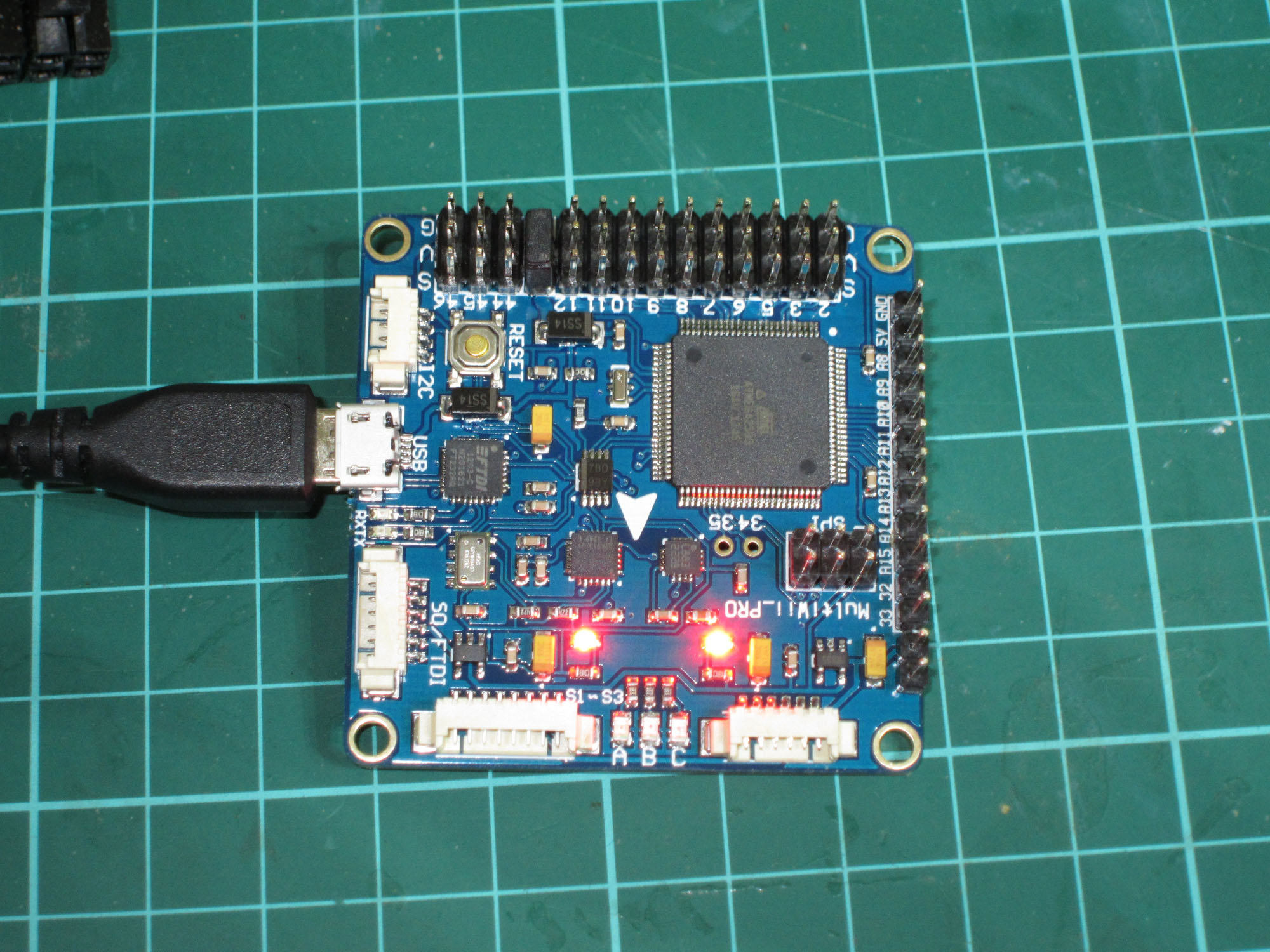
今度は、別のやつ。
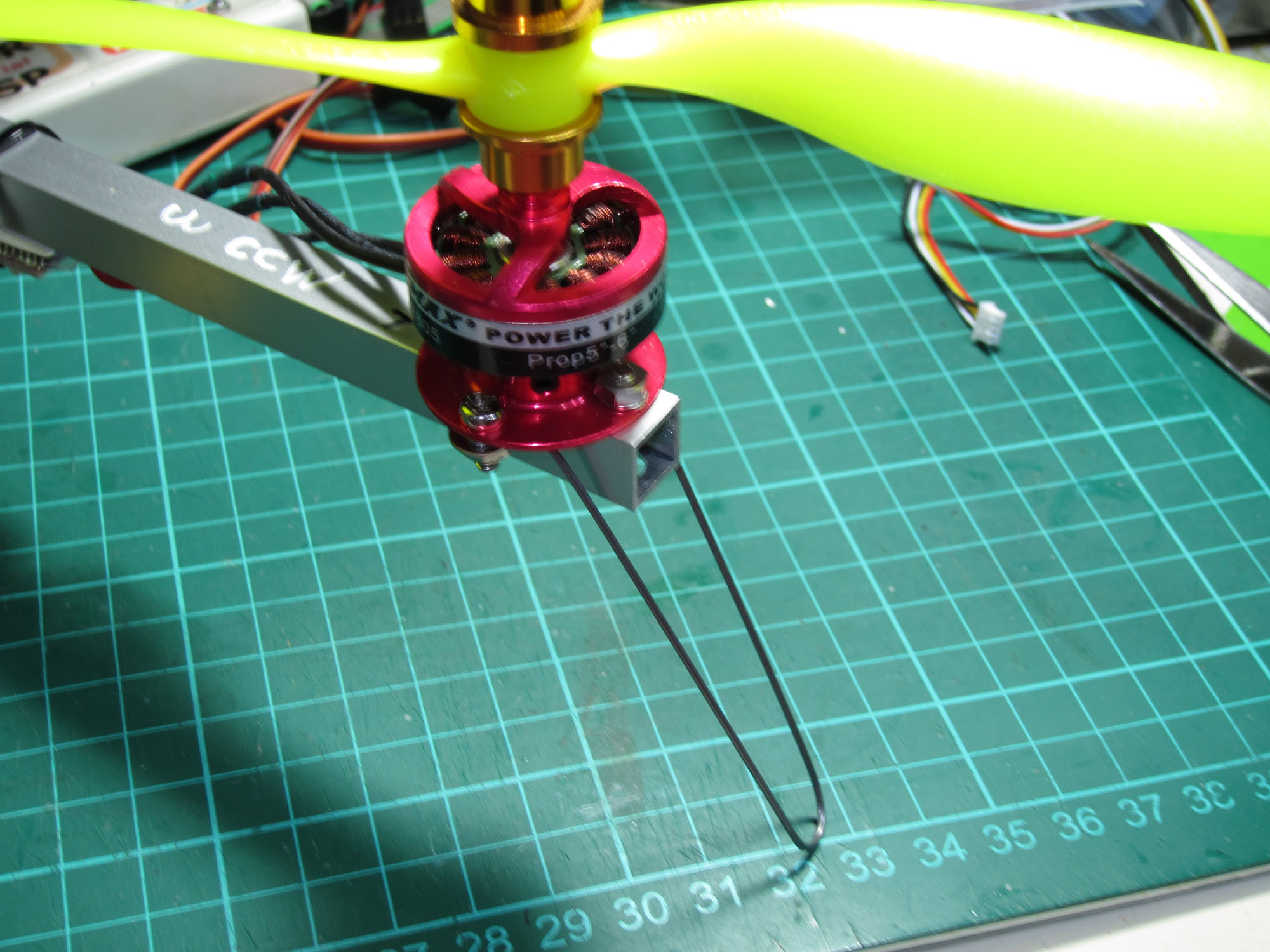
まず、以前に墜落させて壊してしまった「足」を作り直した、今度は、壊れにくく、ショックを吸収できるようにピアノ線で工作。

基板を固定し、受信機を設置
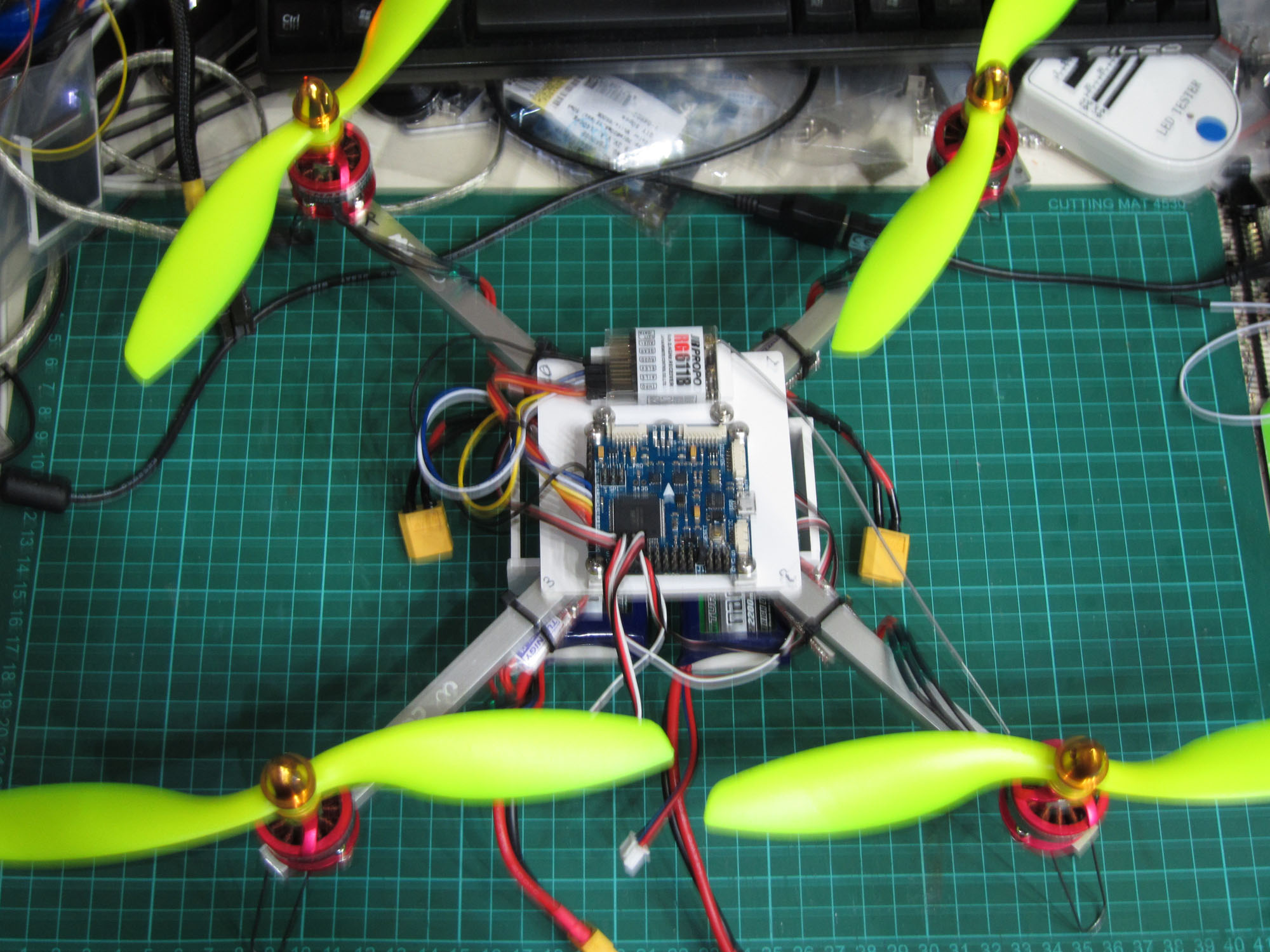
で、買った状態で飛ばしてみたが・・・
うーーん、やはりホバリングすらまともに出来ない・・
※真っ直ぐ上に上がらない・・・(多少ドリフトするのは仕方無いにしても・・・)
このボード、USB 接続出来るので、センサーの状態とかモニター出来る~、アプリケーションとか、色々苦労したが、何とか、内部の状態を観る事が出来たがー、ジャイロも加速度センサーも問題無い!
そこで、色々情報を探すのだが、MultiWii 系の物は多いのだがー、MegaPirateNG に関する物が少ないようだ・・・
そもそも、「MegaPireteNG」より「MultiWii」の方がメジャーぽいし・・・
まぁ、ファームを書き換えても、元に戻せるので、MultiWii を試してみようと思い、最新の2.2を取ってきて、スケッチの設定をこのボード用にし、アップロードしてみた。
「MultiWii」について:
そもそも、「MultiWii」は、Wiiのコントローラーに使われているセンサーを利用して UAV 用のプログラムを「arduino」で動作させるべく始まったようでー、進化してきている。
今回買ったボードは
• ATMega 2560 Microcontroller
• MPU6050 6 axis gyro/accel with Motion Processing Unit
• HMC5883L 3-axis digital magnetometer
• MS5611-01BA01 highprecision altimeter
• FT232RQ USB-UART chip and Micro USB receptacle
主に、↑のような特徴があり、GPS を繋いで自立飛行させたり、かなり色々出来そうで、これから楽しみ。
今度はホバリングはまともに出来そうな感じで、でも部屋の中は狭く、外で試さないと判らない・・
とりあえず、ボードはまともなので、これから、順次試してみたい。